Using Clad¶
This section briefly describes all the key functionalities offered by Clad. If you are just getting started with Clad, then this is the best place to start. You may want to skim some sections on the first read.
In case you haven’t installed Clad already, then please do before proceeding with this guide. Visit Clad installation and usage to know more about installing clad.
Let’s get started.
Automatic Differentiation¶
Clad differentiation functions takes a function as an input and returns a
clad::CladFunction object that contains information about the generated
derived function. Generated derived function can be called by calling the
.execute method on the corresponding clad::CladFunction object.
Clad consists of 4 primary automatic differentiation functions:
clad::differentiate– Primary forward mode automatic differentiationclad::gradient– Primary reverse mode automatic differentiationclad::hessianclad::jacobian
Each of these functions will be explored in this guide.
Todo
Perhaps add example use before proceeding with different differentiation modes.
Forward Mode Automatic Differentiation¶
Forward mode AD computes derivatives of all the output parameters of a program with respect to an input parameter. The input parameter with respect to which differentiation takes place is termed as independent parameter. Mathematically, the forward mode AD allows the efficient computation of columns of the jacobian matrix.
clad::differentiate provides the forward mode differentiation functionality.
It takes as input, a source function and independent parameter information,
parameter with respect to which differentiation should take place, and returns a clad::CladFunction object.
A call to clad::differentiate tells Clad to generate a function that computes the
derivatives of the source function with respect to the independent parameter. We will
call the function generated by Clad that computes derivatives as derived function.
clad::CladFunction is a simple wrapper over the derived function and provides convenient access to it.
Generated derived function is executed by calling the .execute member
function on the associated clad::CladFunction object.
An example that demonstrates the usage of
clad::differentiate:
#include "clad/Differentiator/Differentiator.h"
#include <iostream>
double fn(double x, double y) {
return x*x + y*y;
}
int main() {
// differentiate 'fn' w.r.t 'x'.
auto d_fn_1 = clad::differentiate(fn, "x");
// computes derivative of 'fn' w.r.t 'x' when (x, y) = (3, 4).
std::cout<<d_fn_1.execute(3, 4)<<"\n"; // prints 6
}
The independent parameter can be specified either using the parameter name or the parameter index. Parameter indexing starts from 0. Therefore for the example shown above, the two differentiation calls shown below are equivalent:
clad::differentiate(fn, "x");
and:
clad::differentiate(fn, 0);
The derived function is executed by calling the .execute method on the associated clad::CladFunction object.
Clad forward mode differentiated functions returns the computed derivatives,
this behaviour is unique among other types of derived functions generated by Clad.
Clad can also differentiate with respect to an array element. The following example demonstrates this:
double fn_arr(double* arr, int n) {
double res = 0;
for (int i=0; i<n-1; ++i)
res += arr[i] * arr[i+1];
return res;
}
int main() {
// Differentiate 'fn_arr' w.r.t element '1' of the 'arr' parameter
auto d_fn_arr = clad::differentiate(fn_arr, "arr[1]");
double arr[5] = {1, 2, 3, 4, 5};
std::cout<<d_fn_arr.execute(arr, 5)<<"\n"; // prints 4
}
Arbitrary higher-order derivatives can also be computed using forward mode differentiation. The following examples demonstrate computation of higher-order derivatives:
double fn(double i) { return i * i * i * i; }
int main() {
// Differentiate 3rd order higher derivative of 'fn_arr' w.r.t parameter 'i'
auto d_fn_3 = clad::differentiate<3>(fn, "i");
std::cout << d_fn_3.execute(3) << "\n"; // prints 72.00
}
Clad also supports higher order differentiation of custom derivatives like std::sin. A usage example can be something like:
double mysin(double x) { return std::sin(x); }
int main() {
auto d_sin_3 = clad::differentiate<3>(mysin);
std::cout << d_sin_3.execute(3) << "\n"; // prints 0.989992
}
Note
For derivative orders upto 3, clad has specially defined enums that can be used instead of the integer template parameter. For example, the following code is equivalent to the code shown above:
auto d_fn_3 = clad::differentiate<clad::order::third>(fn, "i");
Note
Forward mode AD can only be used to differentiate with respect to a single value. For differentiating with respect to multiple values (parameters), reverse-mode AD must be used..
Visit API reference of clad::differentiate for more details.
Reverse Mode Automatic Differentiation¶
Hessian Computation¶
Clad can directly compute the
hessian matrix of a
function using the clad::hessian function.
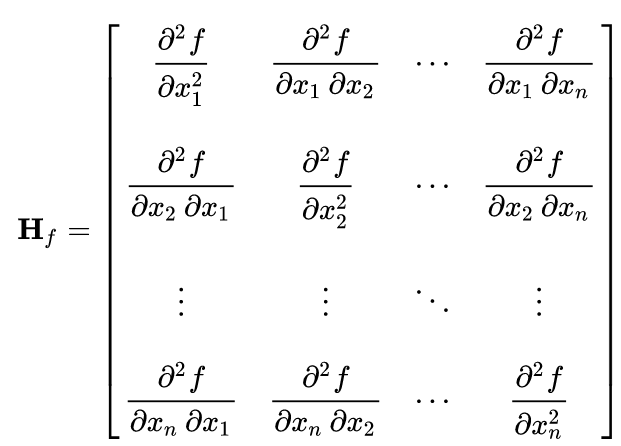
Hessian matrix when specified parameters are (x1, x2, …, xn).¶
clad::hessian provides the hessian computation functionality.
The clad::hessian function takes a source function as input, and optionally,
information about independent parameters – with respect to which hessian should be computed.
Internally, clad::hessian uses both the forward mode AD and the
reverse mode AD to efficiently compute hessian matrix.
An example that demonstrates the usage of clad::hessian:
#include "clad/Differentiator/Differentiator.h"
double kinetic_energy(double mass, double velocity) {
return 0.5 * mass * velocity * velocity;
}
int main() {
// Tells clad to generate a function that computes hessian matrix of the function
// 'kinetic_energy' with respect to all the input paramters.
auto hessian_one = clad::hessian(kinetic_energy);
// Can manually specify independent arguments
auto hessian_two = clad::hessian(kinetic_energy, "mass, velocity");
// Creates an empty matrix to store the Hessian in
// Must have enough space, 2 independent variables requires 4 elements (2^2=4)
double matrix[4];
// Prints the generated Hessian function
hessian_one.dump();
hessian_two.dump();
// Substitutes these values into the Hessian function and pipes the result
// into the matrix variable.
hessian_one.execute(10, 2, matrix);
hessian_two.execute(5, 1, matrix);
}
Few important things to note about clad::hessian:
If no independent variable information is provided, then hessian matrix is computed by taking all differentiable function parameters as independent variables.
Independent argument information is provided as a string literal with comma separated names of function parameters. For example:
double product(double i, double j, double k) { return i*j*k; } // Tells Clad to generate a function that computes hessian matrix of the // 'product' function with respect to the input parameters 'i' and 'j'. auto d_fn = clad::hessian(product, "i, j");
clad::hessianalso supports differentiating w.r.t multiple paramters.
auto d_fn = clad::hessian(fn);
double hessian_matrix[4] = {};
d_fn.execute(3, 5, hessian_matrix);
hessian matrix array should be passed as the last argument to the call to the
CladFunction::executeas shown in the above code sample. It will store the hessian matrix computed by the derived function. The hessian matrix array size should at least be as big as the size required to store the hessian matrix. Passing an array less than the required size will result in undefined behaviour.
Consider the case of the input being an array we need to specify the array index that needs to be differentiated even when we want to differentiate w.r.t entire array.
#include "clad/Differentiator/Differentiator.h"
double fn(double x, double arr[2]) { return x * arr[0] * arr[1]; }
int main() {
auto fn_hessian = clad::hessian(fn, "x, arr[0:1]");
// We have 3 independent variables thus we require space of 9.
double mat_fn[9] = {0};
double num[2] = {1, 2};
fn_hessian.execute(3, num, mat_fn);
}
Jacobian Computation¶
The Jacobian matrix is the generalization of the gradient for vector-valued functions of several variables.
- Clad can compute the
jacobian matrix of a function through the
clad::jacobianinterface.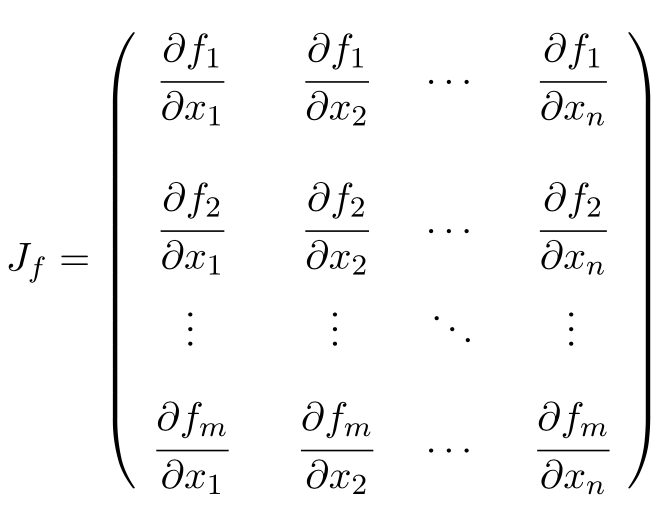
Jacobian matrix of a function with xnparameters: (x1, x2, …, xn).¶
A self-explanatory example that demonstrates the usage of
clad::jacobian:#include "clad/Differentiator/Differentiator.h" void fn_jacobian(double i, double j, double *res) { res[0] = i*i; res[1] = j*j; res[2] = i*j; } int main() { // Generates all first-order partial derivatives columns of a Jacobian matrix // and stores CallExprs to them inside a single function auto jacobian = clad::jacobian(fn_jacobian); // Creates an empty matrix to store the Jacobian in // Must have enough space, 5 columns (the sum of independent variable sizes) and 3 rows (the size of res) clad::matrix<double> d_res(3, 5); // Prints the generated Hessian function jacobian.dump(); // Substitutes these values into the Jacobian function and pipes the result // into the d_res variable. double res[3] = {0, 0, 0}; jacobian.execute(3, 5, res, &d_res); // Now, you can access the derivatives with d_res[i][j]. }
Few important things to note through this example:
clad::jacobiansupports differentiating w.r.t multiple paramters.The clad::matrix args are generated for all array/pointer parameters. They need to be passed after the original parameters to
CladFunction::executecall. The size of every matrix needs to be exactly the size required to store the derivative of the corresponding parameter w.r.t. all input parameters. Passing a matrix of a different size will result in undefined behaviour.
Array Support¶
Clad currently supports differentiating arrays for forward, reverse, hessian and error estimation modes. The interface for these vary a bit.
Forward mode: The interface requires the user to provide the exact index of the array for which the function is to be differentiated. The interface of the diff function remains the same as before. An example is given below:
#include "clad/Differentiator/Differentiator.h"
double f (double arr[4]) { return arr[0] * arr[1] * arr[2] * arr[3]; }
int main() {
// Differentiating the function f w.r.t arr[1] :
auto f_diff = clad::differentiate(f, "arr[1]");
double arr[4] = {1, 2, 3, 4};
// Pass the input to f to the execute function
// The output is stored in a variable with the same type as the return type of f
double f_dx = f_diff.execute(arr);
printf("df/darr[2] = %g\n", f_dx);
}
Reverse mode: The interface doesn’t require any specific index to be mentioned. The interface of the diff function requires you to pass T* for the independent variables after you pass the inputs to the original function. The T here is type of the original variable. The example below will explain it better:
#include "clad/Differentiator/Differentiator.h"
double g(double x, double arr[2]) { return x * arr[0] + x * arr[1]; }
int main() {
// Differentiating g w.r.t all the input variables (x, arr)
auto g_grad = clad::gradient(g);
double x = 2, arr[2] = { 1, 2 };
// Create memory for the output of differentiation
double dx = 0, darr[2] = { 0 };
// The inputs to the original function g (i.e x and arr) are passed
// followed by the variables to store the output (i.e dx and darr)
g_grad.execute(x, arr, &dx, darr);
printf("dg/dx = %g \ndg/darr = { %g, %g } \n", dx, darr[0], darr[1]);
}
Hessian Mode: The interface requires the indexes of the array being differentiated to be mentioned explicitly even if you are trying to differentiate w.r.t the whole array. The interface of the diff function requires you to pass an an array T* after passing the inputs to the original function. The T is the return type of the original function and the size of the array should be at least the square of the number of independent variables (each index of an array is counted as one independent variable). Example:
#include "clad/Differentiator/Differentiator.h"
double h(double x, double arr[3]) { return x * arr[0] * arr[1] * arr[2]; }
int main() {
// Differentiating h w.r.t all the input variables (x, arr)
// Note that the array and the indexes are explicitly mentioned even though all the indexes (0, 1 and 2)
// are being differentiated
auto h_hess = clad::hessian(h, "x, arr[0:2]");
double x = 2, arr[3] = { 1, 2, 3 };
// Create memory for the hessian matrix
// The minimum required size of the matrix is the square of the
// number of independent variables
// Since there are 3 indexes of the array and a scalar variable
// the total number of independent variables are 4
double mat[16];
// The inputs to the original function h (i.e x and arr) are passed
// followed by the output matrix
h_hess.execute(x, arr, mat);
printf("hessian matrix: \n"
"{ %g, %g, %g, %g\n"
" %g, %g, %g, %g\n"
" %g, %g, %g, %g\n"
" %g, %g, %g, %g }\n",
mat[0], mat[1], mat[2], mat[3],
mat[4], mat[5], mat[6], mat[7],
mat[8], mat[9], mat[10], mat[11],
mat[12], mat[13], mat[14], mat[15]);
}
Error estimation: This interface is the same as with reverse mode.
Differentiating Functors and Lambdas¶
Despite significant differences, differentiating functors and lambda expressions is remarkably similar to differentiating ordinary functions. Similarly, computing the hessian matrix and jacobian matrix of functors and lambda expressions is also similar to computing hessian matrix and jacobian matrix of ordinary functions.
Differentiating functors and lambdas means differentiating the call operator (operator()) member function defined by the functor and lambda type and executing the differentiated function using a reference to the functor object.
An example that demonstrates the differentiation of functors:
#include "clad/Differentiator/Differentiator.h"
// A class type with user-defined call operator
class Equation {
double m_x, m_y;
public:
Equation(double x = 0, double y = 0) : m_x(x), m_y(y) {}
double operator()(double i, double j) {
return m_x*i*j + m_y*i*j;
}
void setX(double x) {
m_x = x;
}
};
int main() {
Equation E(3, 5);
// Functor is an object of any type which have user defined call operator.
//
// Clad differentiation functions can directly differentiate functors.
// Functors can be passed to clad differentiation functions in two distinct
// ways:
// 1) Pass by reference
// differentiates 'E' wrt parameter 'i'
// object 'E' is saved in the 'CladFunction' object 'd_E'
auto d_E = clad::differentiate(E, "i");
// 2) Pass as pointers
// differentiates 'E' wrt parameter 'i'
// object 'E' is saved in the 'CladFunction' object 'd_E_pointer'
auto d_E_pointer = clad::differentiate(&E, "i");
// calculate differentiation of 'E' when (i, j) = (7, 9)
double res1 = d_E.execute(7, 9); // prints 66
double res2 = d_E_pointer.execute(7, 9); // prints 66
}
Functors and lambda expressions can be passed both by reference and by pointers. Therefore, the two differentiation calls shown below are equivalent:
Experiment E; // a functor
// passing function by reference
auto d_E = clad::differentiate(E, "i");
and:
Experiment E; // a functor
// passing function by pointer
auto d_E = clad::differentiate(&E, "i");
An example that demonstrates differentiation of lambda expressions:
int main() {
auto lambda = [](double i, double j) {
return i*j;
};
// Pass by reference
auto lambda_grad = clad::gradient(lambda);
// Can be passed by pointer as well!!
auto lambda_grad_pointer = clad::gradient(&lambda);
double d_i_1, d_j_1, d_i_2, d_j_2;
d_i_1 = d_j_1 = d_i_2 = d_j_2 = 0;
lambda_grad.execute(3, 5, &d_i_1, &d_j_1);
lambda_grad_pointer.execute(3, 5, &d_i_2, &d_j_2);
std::cout<<d_i_1<<" "<<d_j_1<<"\n"; // prints 5 3
std::cout<<d_i_2<<" "<<d_j_2<<"\n"; // prints 5 3
}
Note
Functor class should not contain multiple overloaded call operators. This restriction will be removed in the future.
Differentiable Class Types¶
Note
This feature is currently experimental. Expect some adventures while using it. If you do decide to go on this adventure, please consider giving your review as well on how we can improve this functionality.
One of the main goals of Clad is to be able to differentiate existing codebases with minimal boilerplate code. Most existing codebases invariably use several data structures for representing different information at various stages of computations. Thus, we are adding support for differentiating class type objects for convenient and effective differentiation of existing codebases.
Before going any further, let’s first understand how data structures and functions relate to their mathematical counterparts, and what does it mean for a data structure or a function to be differentiable. As per the principles of calculus and from purely mathematical perspective, only mathematical functions, are differentiable. Intuitively, data structures represent a mathematical space, and are thus, not differentiable from mathematical point of view. On the other hand, functions represent mathematical functions and can thus, be differentiable. Please note that not all functions represent a mathematical space. We will call a function, a differentiable function, if it represents a mathematical function and can be differentiated. We will call a type, a differentiable type, if Clad can perform calculus on the values of this type. A differentiable function should only use differentiable types in its definition.
where
For a class type to be differentiable, it should satisfy the following rules:
Represent a real vector space.
Have a default constructor that zero initialises the object of the class. Class objects initialised by the default constructor should represent 0 tangent vector – that is, all real data members should be equal to 0.
Copy initialisation should perform deep copy initialisation. For example, after performing the initialisation
a(b):, 1) there should be no shared resource betweenaandb, and 2) values of all the associated data members ofaandbshould be equal.Assignment operator should performs deep copy. For example, after performing the assignment
a = b;: there should be no shared resource betweenaandb; and values of all the associated data members ofaandbshould be equal.
In general, type of derivative of a variable of type ‘YType’ with respect to
a variable of type ‘XType’ is a function of both ‘YType’ and ‘XType’. Therefore,
\(DerivativeType = f(YType, XType)\). Intuitively, derivative type should be
able to represent all the derivatives that are obtained on differentiating a variable
y with respect to a variable x. We will obtain more than one derivative if either
or both of x and y are aggregate types.
In case when both y and x are built-in scalar numerical type, as your
intuition probably suggests, the derivative type is also a built-in scalar
numerical type. Things get more complicated when one or both the types
are aggregate types. When used in a computation, aggregate types – or more generally,
class types – represent a mathematical space. In the specific case when either of y
or x is a built-in numerical scalar type, the derivative type can be considered
to be the other type. For example, consider the following aggregate type:
struct Vector {
double data[5];
};
If we are differentiating a variable v of type Vector with respect to a variable x of type double.
Then, the derivative is of the Vector type. Mathematically, let Vector represents
a vector space \(V\), then the following relations holds true:
If \(\pdv{v}{x}\) is stored in a variable d_v. Then we can access the individual derivatives as follows:
d_v.data[0]; // derivative of v.data[0] w.r.t x
d_v.data[1]; // derivative of v.data[1] w.r.t x
.. and so on ..
Similarly, in the case of differentiating a variable y of type double with respect to a variable v of type Vector,
the derivative, d_v, is again of the Vector type. But the derivatives represented by the elements of d_v.data` have changed.
In this case, the elements of d_v.data represent derivative of y with respect to each of the elements of v.data.
If \(\pdv{x}{v}\) is stored in a variable d_v. Then we can access the individual derivatives as follows:
d_v.data[0]; // derivative of x w.r.t v.data[0]
d_v.data[1]; // derivative of x w.r.t v.data[1]
.. and so on ..
Currently, class type support have the following limitations:
Calls to member functions are not supported
Calls to overloaded operators are not supported
Initialising class type variables using non-default constructors that take non-literal arguments (non-zero derivatives) are not supported.
Class cannot have pointer or reference data members.
Class type support is under active development and thus, most of these limitations will be removed soon.
The non_differentiable Attribute¶
Occasionally, you may want to skip differentiating a specific variable or function call. For example, some variables might be used purely for logging, as constants, or as standalone metrics. Clad provides the non_differentiable annotation attribute to safely omit generating derivatives for these components.
You can apply this attribute using Clang’s annotation syntax. The most common approach is to define a macro alias:
#define non_differentiable __attribute__((annotate("non_differentiable")))
If the non_differentiable attribute is applied to a variable, Clad skips generating a derivative counterpart for it:
class PointData {
public:
double x;
double y;
non_differentiable double weight; // Clad will not compute derivatives with respect to this member
};
If the attribute is applied to a function declaration, Clad refrains from producing any derivative expressions for that specific function. Instead, calls to the primal function are injected directly, behaving as if the result has a zero derivative:
non_differentiable double get_scaling_factor(double i, double j) {
return i * j;
}
double compute(double i, double j) {
// get_scaling_factor will skip differentiation completely.
return get_scaling_factor(i, j) + i * j;
}
Specifying Custom Derivatives¶
At times Clad may be unable to differentiate your function (e.g. if its definition is in a library and the source code is not available) or an efficient/more numerically stable expression for derivatives may be known that couldn’t be computed just by applying the rules of automatic differentiation. In such cases, it is useful to be able to specify custom derivatives for the function.
Clad supports this functionality by allowing the user to specify their own custom derivatives
pushforward and pullback functions in the namespace clad::custom_derivatives::.
For a function FNAME one can specify:
a custom derivative pushforward function by defining a function
FNAME_pushforwardinside the namespaceclad::custom_derivatives::.a custom derivative pullback function by defining a function
FNAME_pullbackinside the namespaceclad::custom_derivatives::.
When Clad will encounter a function FNAME, it will first search for a
suitable custom derivative function definition within the custom_derivatives namespace.
Provided no definition was found, Clad will proceed to automatically derive the function.
Please read Pushforward and Pullback Functions section to get better understanding of them.
Note
Currently, there is no way of specifying custom derivative function for member functions. This limitation will be removed soon.
Example:
Suppose that you have a function
my_pow(x, y)which computesxto the power ofy. In this example, Clad is not able to differentiatemy_pow’s body (e.g. it calls an external library or uses some non-differentiable approximation):double my_pow(double x, double exponent) { // something non-differentiable here... }
However, the analytical formulas of its derivatives are known, thus one can easily specify custom derivatives:
namespace clad {
namespace custom_derivatives {
double my_pow_pullback(double x, double exponent, double d_x,
double d_exponent) {
return exponent * my_pow(x, exponent - 1) * d_x +
(my_pow(x, exponent) * ::std::log(x)) * d_exponent;
}
}
}
Moreover, a custom gradient can be specified:
namespace clad {
namespace custom_derivatives {
void my_pow_pullback(double x, double exponent, double d_y,
double *d_x, double *exponent) {
double t = my_pow(x, exponent-1);
*d_x += t * d_y;
*d_exponent += t * x * ::std::log(x) * d_y;
}
}
}
Whenever Clad will encounter my_pow inside a differentiated function, it
will first try to find and use the provided custom derivative funtion before
attempting to automatically differentiate it.
Note
Clad provides custom derivatives for some mathematical functions from <cmath> by default.
Numerical Differentiation Fallback¶
In the cases that Clad is unable to differentiate a function by itself or cannot see the function’s definition, it will numerically differentiate the function. Clad uses the Five-Point Stencil Method with support for differentiating most scalar or array (pointer) types. For a comprehensive demo on numerically differentiating custom/user-defined types, you can checkout the following demo.
This default behavior can be disabled by passing the -DCLAD_NO_NUM_DIFF flag during the compilation of your programs. This will cause Clad to fail and error out if it encounters something non-differentiable. Another interesting bit of information that can be solicited from numerical differentiation calls is error information. Since numerical differentiation is only a way to estimate the derivative, it is essential to keep track of any associated errors. Error estimates from numerical differentiation calls can be printed to stdout using the -fprint-num-diff-errors compilation flag. This flag is overridden by the -DCLAD_NO_NUM_DIFF flag.
Error Estimation¶
Clad is capable of annotating a given function with floating point error estimation code using reverse mode AD. An interface similar to clad::gradient(f) is provided as follows:
clad::estimate_error(f), where f is a pointer to the function or method to be annotated with floating point error estimation code.
The function signature of the generated code is the same as from clad::gradient(f) with an extra argument at the end of type double&, which returns the total floating point error in the function by reference. For a user function double f(double, double) example usage is described below:
double f(double x, double y) {
double z;
z = x + y;
return z
}
int main() {
// Generate the floating point error estimation code for 'f'.
auto df = clad::estimate_error(f);
// Print the generated code to standard output.
df.dump();
// Declare the necessary variables.
double x, y, d_x, d_y, final_error = 0;
// Finally call execute on the generated code.
df.execute(x, y, &d_x, &d_y, final_error);
// After this, 'final_error' contains the floating-point error in function 'f'.
}
The above example generates the floating point error estimation code using an in-built taylor approximation model. However, Clad is capable of using any user defined custom model, for information on how to use you own custom model, please visit this demo. This tutorial provides a comprehensive guide on building your own custom models and understanding the working behind the error estimation framework.
